Search Results
Whole-body compliant control of iCub with OpenSoT
OpenSoT: a whole-body control library for COMAN - ICRA 2015
QP-based whole body controller on the icub robot
OpenSoT: a Whole-Body Control Library for the Compliant Humanoid Robot COMAN
Robust real-time whole-body motion retargeting from human to humanoid
iCub dynamic balancing and walking
Robust Real-time Whole-Body Motion Retargeting from Human to Humanoid - fast and challenging motions
Compliant control demo
Robotics - Dynamic Walking of Whole-body Compliant Humanoid COMAN
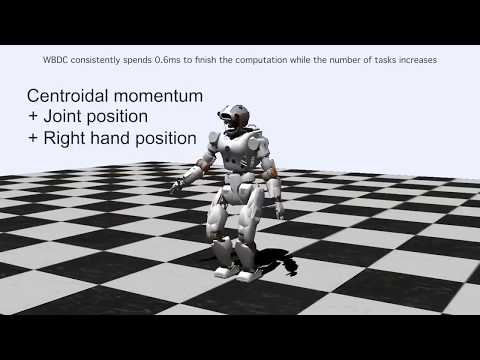
Computationally Efficient Prioritized Whole-Body Controller with Contact Constraints
DYNAMIC WHOLE-BODY CONTROL
iCub robot controlled by MTRNN